Motor Induksi adalah alat listrik yang mengubah energi listrik menjadi energi mekanik. Listrik yang diubah adalah listrik 3 phasa. Motor induksi sering juga disebut motor tidak serempak atau motor asinkron.
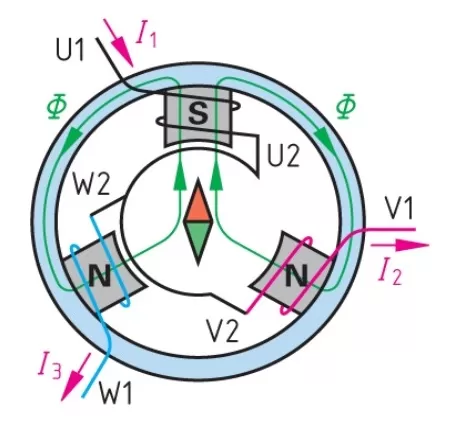
Prinsip kerja motor induksi terlihat seperti pada gambar di atas yaitu ketika tegangan phasa U masuk ke belitan stator menjadikan kutub S, garis-garis gaya magnet mengaliir melalui stator, sedangkan dua kutub lainnya adalah N untuk phasa V dan phasa W. Kompas akan saling tarik menarik dengan kutub S.
Berikutnya kutub S pindah ke phasa V, kompas berputar 120° dilanjutkan kutub S pindah ke phasa W, sehingga pada belitan stator timbul medan magnet putar. Buktinya kompas akan memutar lagi menjadi 240°. Kejadian berlangsung silih berganti membentuk medan magnet putar sehingga kompas berputar dalam satu putaran penuh, proses ini berlangsung terus menerus.
Dalam motor induksi kompas digantikan oleh rotor sangkar yang akan berputar pada porosnya. Karena ada perbedaan putaran antara medan putar stator dengan putaran rotor, maka disebut motor induksi tidak serempak atau motor asinkron.
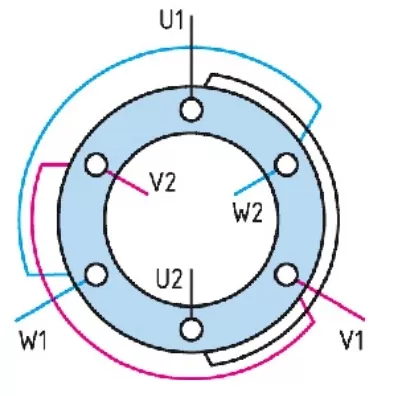
Susunan belitan strator motor induksi dengan dua kutub, memiliki tiga belitan yang masing-masing berbeda sudut 120°. Ujung belitan phasa pertama adalah U1-U2, belitan phasa kedua adalah V1-V2 dan belitan phasa ketiga yaitu W1-W2.
Prinsip kerja motor induksi dijelaskan dengan gelombang sinusoidal sebagai berikut.
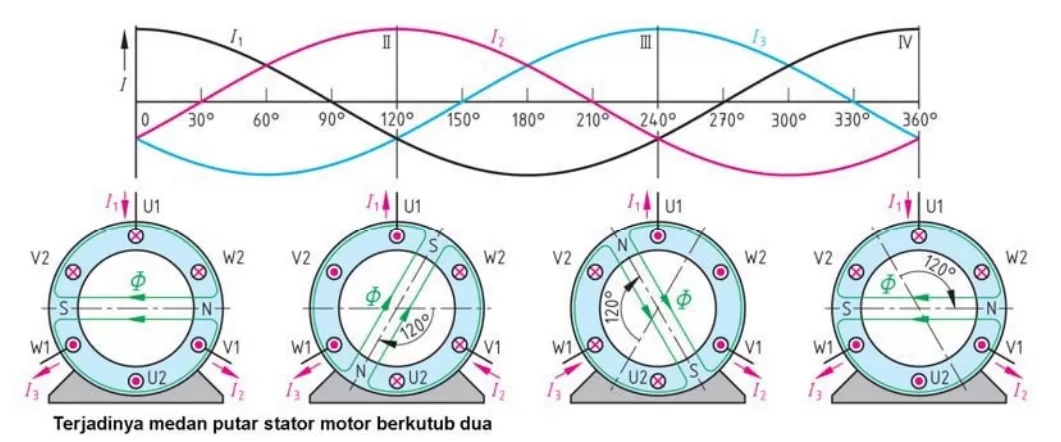
Terbentuknya medan putar pada stator motor induksi. Tampak stator dengan dua kutub, dapat diterangkan dengan empat kondisi.
- Saat sudut 0°. Arus I1 bernilai positif dan arus I2 dan arus I3 bernilai negatif dalam hal ini belitan V2, U1 dan W2 bertanda silang dan belitan V1, U2, dan W1 bertanda titik. Terbentuk fluk magnet pada garis horizontal sudut 0°. Kutub S dan kutub N
- Saat sudut 120°. Arus I2 bernilai positif dengan arus I1 dan arus I3 bernilai negatif, dalam hal ini belitan W2, V1, dan U2 bertanda silang, dan kawat W1, V2, dan U1 bertanda titik. Garis fluk magnet kutub S dan N bergeser 120° dari posisi awal
- Saat sudut 240°. Arus I3 bernilai positif dan I1 dan I22 bernilai negatif, belitan U2, W1, dan V2 bertanda silang, dan kawat U1, W2, dan V1 bertanda titik. Garis fluk magnet kutub S dan N bergeser 120°dari posisi kedua
- Saat sudut 360°. Posisi ini sama dengan saat sudut 0°. Dimana kutub S dan N kembali ke posisi awal sekali.
1. Konstruksi Motor Induksi
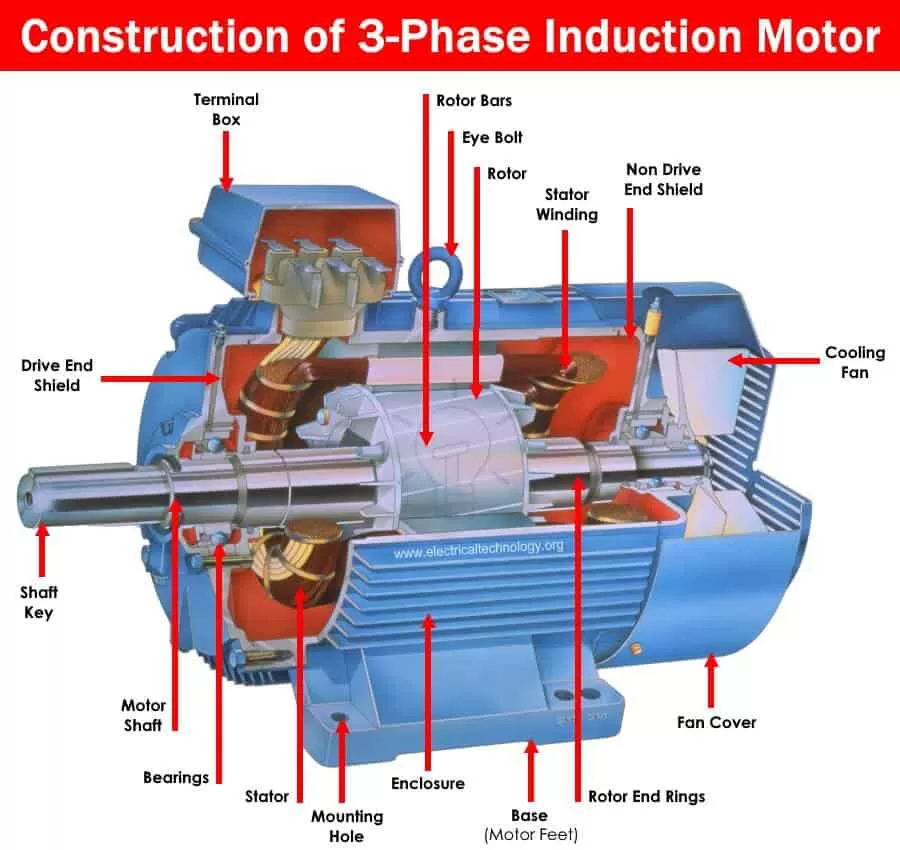
Konstruksi motor induksi secara detail terdiri atas atas dua bagian yaitu stator dan rotor. Stator adalah bagian motor yang diam terdiri atas badan motor, inti stator, belitan stator, bearing dan terminal box. Rotor adalah bagian motor induksi yang berputar, terdiri atas rotor sangkar, dan poros rotor.
2. Rugi-Rugi dan Efisiensi Motor Induksi
Motor induksi memiliki rugi-rugi yang terjadi karena dalam motor induksi terdapat komponen tahanan tembaga dari belitan stator dan komponen induktor belitan stator. Pada motor induksi terdapat rugi-rugi tembaga, rugi inti, dan rugi karena gesekan dan hambatan angin.
Besarnya rugi tembaga sebanding dengan I².R, semakin besar arus beban maka rugi tembaga semakin besar juga. Daya input motor sebesar P1, maka daya yang diubah menajadi daya output sebesar P2.
Persamaan menghitung rugi-rugi motor induksi:
Rugi-rugi motor = P1 – P2
Persamaan menghitung efisiensi motor induksi:
3. Putaran Motor Induksi
Motor induksi memiliki dua arah putaran motor, yaitu putaran searah jarum jam (kanan) dan putaran berlaanan jarum jam (ke kiri) dilihat dari poros motor.
Putaran motor induksi tergantung jumlah kutubnya, motor induksi berkutub dua memiliki putaran poros sekitar 2.950 rpm, yang berkutub empat memiliki putarn poros mendekati 1.450 rpm.
Putaran arah jarum jam didapat dengan cara menghubungkan L1- terminal U, L2- terminal V dan L3- terminal W. Putaran arah berlawanan jjarum jam di dapat dengan menukarkan salah satu dari kedua kabel phasa, misalkan L1- terminal U, L2-terminal W dan L3- terminal V. Dengan memasang dua buah kontaktor, sebuah motor induksi dapat dikontrol untuk putaran kanan dan putaran kekiri.
4. Karakteristik Torsi Motor Induksi
Karakteristik torsi motor induksi disebut torsi fungsi dari slip. Dikenal ada empat jenis torsi, yaitu:
- MA, momen torsi awal
- MS, momen torsi pull-up
- MK, momen torsi maksimum
- MB, momen torsi kerja
Torsi awal terjadi saat motor pertama dijalankan, torsi pull-up terjadi saat slip 0,7, torsi maksimum terjadi slip 0,2 dan torsi kerja berada ketika slip 0,05. Torsi beban harus lebih kecil dari torsi motor.
Bila torsi beban lebih besar dari torsi motor, akibatnya motor dalam kondisi kelebihan beban dan berakibat belitan stator terbakar. Untuk mengatasi kondisi beban lebih dalam rangkaian kontrol dilengkapi dengan pengaman beban lebih disebut thermal overload, yang dipasang dengan kontraktor.
Karakteristik torsi juga bisa disajikan dalam bentuk lain, kita kenal karakteristik putaran = fungsi torsi. Karakteristik motor induksi lainnya mencakup parameter efisiensi, faktor kerja, rasio arus dan rasio putaran. Dengan membaca karakteristik motor induksi dapat diketahui setiap parameter yang dibutuhkan. Saat torsi mencapai 100% dapat dibaca rasio arus I/I0 = 1; faktor kerja cos Ψ: 0,8, efisiensi motor 0,85 dan rasio putaran n/ns : 0,92.
5. Pengasutan Motor Induksi
Pengasutan motor induksi adalah cara menjalankan pertama kali motor, tujuannya agar arus starting kecil dan drop tegangan masih dalam batas toleransi. Ada beberapa cara teknik pengasutan, diantaranya:
- Hubungan langsung (Direct On Line = DOL)
- Tahapan depan Stator (Primary Resistor)
- Transformator
- Segitiga-Bintang (Star-Delta)
- Pengasutan sofat starting
- Tahanan rotor lilit
Saat motor induksi di starting secara langsung, arus awal motor besarnya antara 500% sd 700% dari arus nominal. Ini akan menyebabkan drop tegangan yang besar pada pasokan tegangan PLN. Untuk motor daya kecil sampai 5 kW, arus starting tidak berpengaruh besar terhadap drop tegangan.
Pada motor dengan daya diatas 30 kW sampai dengan 100 kW akan menyebabkan drop tegangan yang besar dan menurunkan kualitas listrik dan pengaruhnya pada penerangan yang berkedip.
